| e-mail: contact@masw.com |
Dispersion Analysis of Passive MASW Methods
In a passive surface-wave survey, complications arise because of the unknown source characteristics such as location (azimuth and distance), impact time, impact power,
and number of wave generations. Therefore, a 2-D receiver array must be used to deal with these unknown characteristics, especially the issue of location. Historically, the
microtremor survey method (MSM) has been using preferably a scheme called spatial autocorrelation (SPAC) (Aki, 1957) with occasional use of the conventional f-k method to
construct the fundamental mode dispersion curve.
SPAC was a mathematical invention to reduce the effect from azimuth, the most disturbing factor for dispersion analysis, by using the polar-coordinate formulation of surface
wave arrivals at a symmetric receiver array. It was perhaps the best solution feasible at the time, when only a limited number of channels were available, not enough
channels to accurately deal with the azimuth issue. Because of this mathematical formulation that was heavily motivated to reduce the azimuth influence, other features
necessary for dispersion analysis such as resolution (or sensitivity) and the capability of multimodal analysis were largely ignored. Because nowadays 24 or more channels
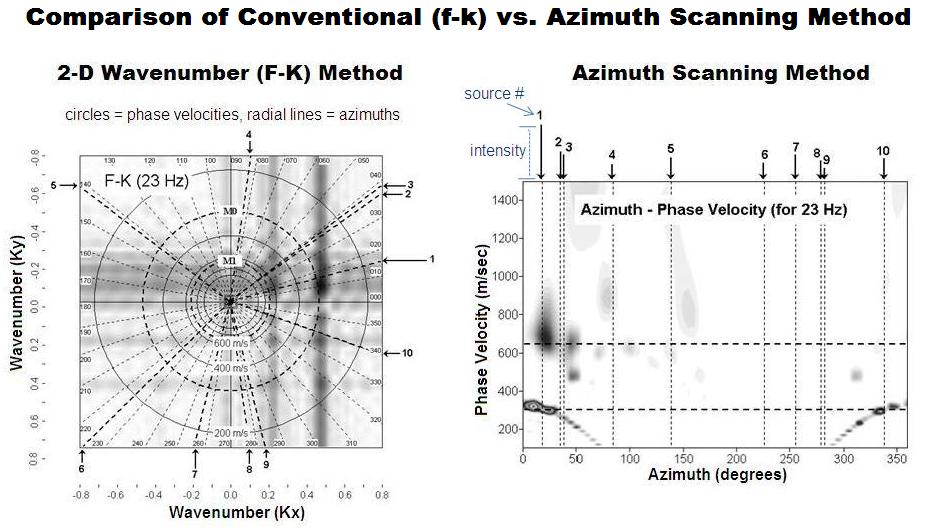
are commonly available, the issue can be addressed effectively by wavefield transformation. The conventional commonly-called f-k method, which should more appropriately
be called a 2-D wavenumber (Kx-Ky) method, can also achieve the same goal but more care must be taken in selection of processing parameters such as increment in
wavenumber, proper handling of the mono-frequency concept, etc. Failure to consider these issues with the f-k method often leads to artifacts and biased estimation of
phase velocity. Moreover, the f-k method is not convenient to grasp the whole pattern of dispersion curves because of its mono-frequency-at-a-time limitation. Park et al.
(2004) addressed dispersion imaging issues by extending the scheme normally used for the active MASW survey (Park et al., 1998a).
Dispersion Imaging Scheme (Passive Remote MASW Survey)
Recently, as more urban applications arise, approaches using the conventional 1-D linear receiver array are emerging because space to deploy a 2-D receiver array is often
just not available. With these 1-D approaches, receivers are conveniently deployed along the sidewalk, shoulder, and median of a road. It can also accomplish a 2-D Vs
mapping by continuously moving the array. Accuracy of the dispersion analysis with these approaches, however, can become an issue depending on how those offline
propagations arriving in oblique angles are handled.
Louie (2001) first implemented this 1-D array approach armed with an imaging method for dispersion analysis—called the pi-omega method (McMechan and Yedlin, 1981)—
that utilizes a more-commonly-known slant-stack process (Schultz and Claerbout, 1978). This approach, a Remi method, has been widely used recently. Park and Miller
(2008), however, indicated this method has a fundamental flaw in dispersion analysis. Louie (2001) determined that the band nature of dispersion image was largely due to
the offline propagation of surface waves that arrived at the receiver array in oblique angles instead of due to the intrinsic nature of the band-limited wavefield transformation.
Because of this, dispersion curve picking can become an arbitrary process within the scope of the band thickness. Park and Miller (2008) tried to account for those offline
arrivals by considering offline-cylindrical and offline-planar propagations by mofifying the azimuth scanning method for the 2-D receiver array by Park et al. (2004).
Dispersion Imaging Scheme (Passive Roadside MASW Survey)
Park (2008) acknowledged that, in the case of roadside passive survey, it is usually one fixed point on the road near the survey site that generates the strongest surface wave
event whose energy eventually contributes to the construction of the dispersion image. It therefore focused in the way to estimate location information for this point as
accurately as possible to treat the data as being identical to a data set from an active survey. Furthermore, it showed that the azimuth information is much more critical for
accurate imaging than distance information. With accurate detection of the azimuth, a roughly estimated distance is used to complete the location information and
subsequent processing steps become identical to those for active surveys. This method can be applied to a data set not only from a 2-D receiver array but also from a 1-D
linear array.
Dispersion Imaging with Active Scheme by Azimuth Detection
In a passive surface-wave survey, complications arise because of the unknown source characteristics such as location (azimuth and distance), impact time, impact power,
and number of wave generations. Therefore, a 2-D receiver array must be used to deal with these unknown characteristics, especially the issue of location. Historically, the
microtremor survey method (MSM) has been using preferably a scheme called spatial autocorrelation (SPAC) (Aki, 1957) with occasional use of the conventional f-k method to
construct the fundamental mode dispersion curve.
SPAC was a mathematical invention to reduce the effect from azimuth, the most disturbing factor for dispersion analysis, by using the polar-coordinate formulation of surface
wave arrivals at a symmetric receiver array. It was perhaps the best solution feasible at the time, when only a limited number of channels were available, not enough
channels to accurately deal with the azimuth issue. Because of this mathematical formulation that was heavily motivated to reduce the azimuth influence, other features
necessary for dispersion analysis such as resolution (or sensitivity) and the capability of multimodal analysis were largely ignored. Because nowadays 24 or more channels
are commonly available, the issue can be addressed effectively by wavefield transformation. The conventional commonly-called f-k method, which should more appropriately
be called a 2-D wavenumber (Kx-Ky) method, can also achieve the same goal but more care must be taken in selection of processing parameters such as increment in
wavenumber, proper handling of the mono-frequency concept, etc. Failure to consider these issues with the f-k method often leads to artifacts and biased estimation of
phase velocity. Moreover, the f-k method is not convenient to grasp the whole pattern of dispersion curves because of its mono-frequency-at-a-time limitation. Park et al.
{kind=link}
(2004) addressed dispersion imaging issues by extending the scheme normally used for the active MASW survey (Park et al., 1998a).
Dispersion Imaging Scheme (Passive Remote MASW Survey)
Recently, as more urban applications arise, approaches using the conventional 1-D linear receiver array are emerging because space to deploy a 2-D receiver array is often
just not available. With these 1-D approaches, receivers are conveniently deployed along the sidewalk, shoulder, and median of a road. It can also accomplish a 2-D Vs
mapping by continuously moving the array. Accuracy of the dispersion analysis with these approaches, however, can become an issue depending on how those offline
propagations arriving in oblique angles are handled.
Louie (2001) first implemented this 1-D array approach armed with an imaging method for dispersion analysis—called the pi-omega method (McMechan and Yedlin, 1981)—
that utilizes a more-commonly-known slant-stack process (Schultz and Claerbout, 1978). This approach, a Remi method, has been widely used recently. Park and Miller
(2008), however, indicated this method has a fundamental flaw in dispersion analysis. Louie (2001) determined that the band nature of dispersion image was largely due to
the offline propagation of surface waves that arrived at the receiver array in oblique angles instead of due to the intrinsic nature of the band-limited wavefield transformation.
Because of this, dispersion curve picking can become an arbitrary process within the scope of the band thickness. Park and Miller (2008) tried to account for those offline
arrivals by considering offline-cylindrical and offline-planar propagations by mofifying the azimuth scanning method for the 2-D receiver array by Park et al. (2004).
Dispersion Imaging Scheme (Passive Roadside MASW Survey)
Park (2008) acknowledged that, in the case of roadside passive survey, it is usually one fixed point on the road near the survey site that generates the strongest surface wave
event whose energy eventually contributes to the construction of the dispersion image. It therefore focused in the way to estimate location information for this point as
accurately as possible to treat the data as being identical to a data set from an active survey. Furthermore, it showed that the azimuth information is much more critical for
accurate imaging than distance information. With accurate detection of the azimuth, a roughly estimated distance is used to complete the location information and
subsequent processing steps become identical to those for active surveys. This method can be applied to a data set not only from a 2-D receiver array but also from a 1-D
linear array.
Dispersion Imaging with Active Scheme by Azimuth Detection
| | | | | | | | |